

Gets a fix
in seconds
Reach RS2 gets a fixed solution in just seconds and maintains robust performance even in challenging conditions. Centimeter accuracy can be achieved on distances up to 60 km in RTK, and 100 km in PPK mode.
PPP
support
RINEX raw data logs are compatible with PPP services so you can now get centimeter-precise results in any place on Earth. Process RINEX files in an online service and get position with absolute accuracy.
GPS, GLONASS, BeiDou,Galileo, and QZSS
L1OF, L2OF, L1C/A, L2C,E1B/C, E5b, B1I B2I
Built-in
3.5G modem
Reach RS2 features a power-efficient 3.5G HSPA modem with 2G fallback and global coverage. Now corrections can be accessed or broadcasted over NTRIP independently, without relying on Internet connection on your phone.
22 hours
on 1 charge
Up to 22 hours of autonomous work when logging data and up to 16 hours as a 3G rover, even in cold weather—no more need to carry spare batteries with you. Reach RS2 can charge from a USB wall charger or a power bank over USB-C.
Surveying
with ReachView
The easiest to use software for data collection that is available both for Android and iOS. With ReachView, you can collect and stakeout points and control all the features of Reach receivers, such as setting up a base station, logging RINEX data, and configuring NMEA output.
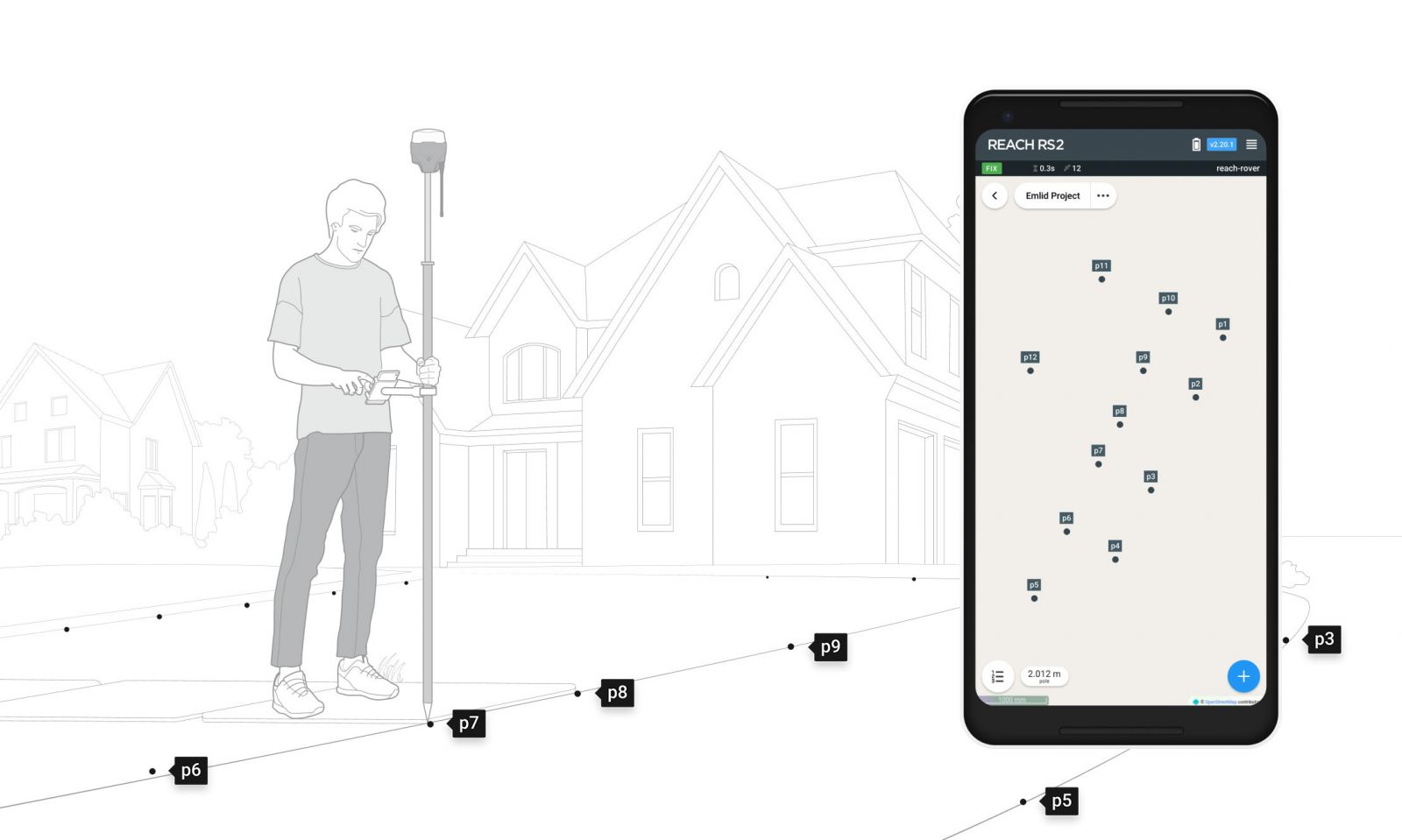
Point collection:
create projects, save points, and export in industry standard formats
Record each position as a point with centimeter precise coordinates. Export projects and open them in GIS or CAD software like AutoCAD, ArcGIS, QGIS, and others.
Formats
DXF, CSV, GeoJSON, ESRI Shapefile

Stakeout:
Find points' position on the ground
Stakeout is used to find exact physical locations of points. They can be collected in ReachView or imported from other CAD or GIS software.
Process of stakeout in ReachView has two steps: map view and bulls-eye. Map's purpose is to help you navigate to points on long distances. When you get closer than 40 cm to the point, bulls-eye turns on to make it easier for you to visually match receiver and point.
Formats
CSV, DXF and GeoJSONs
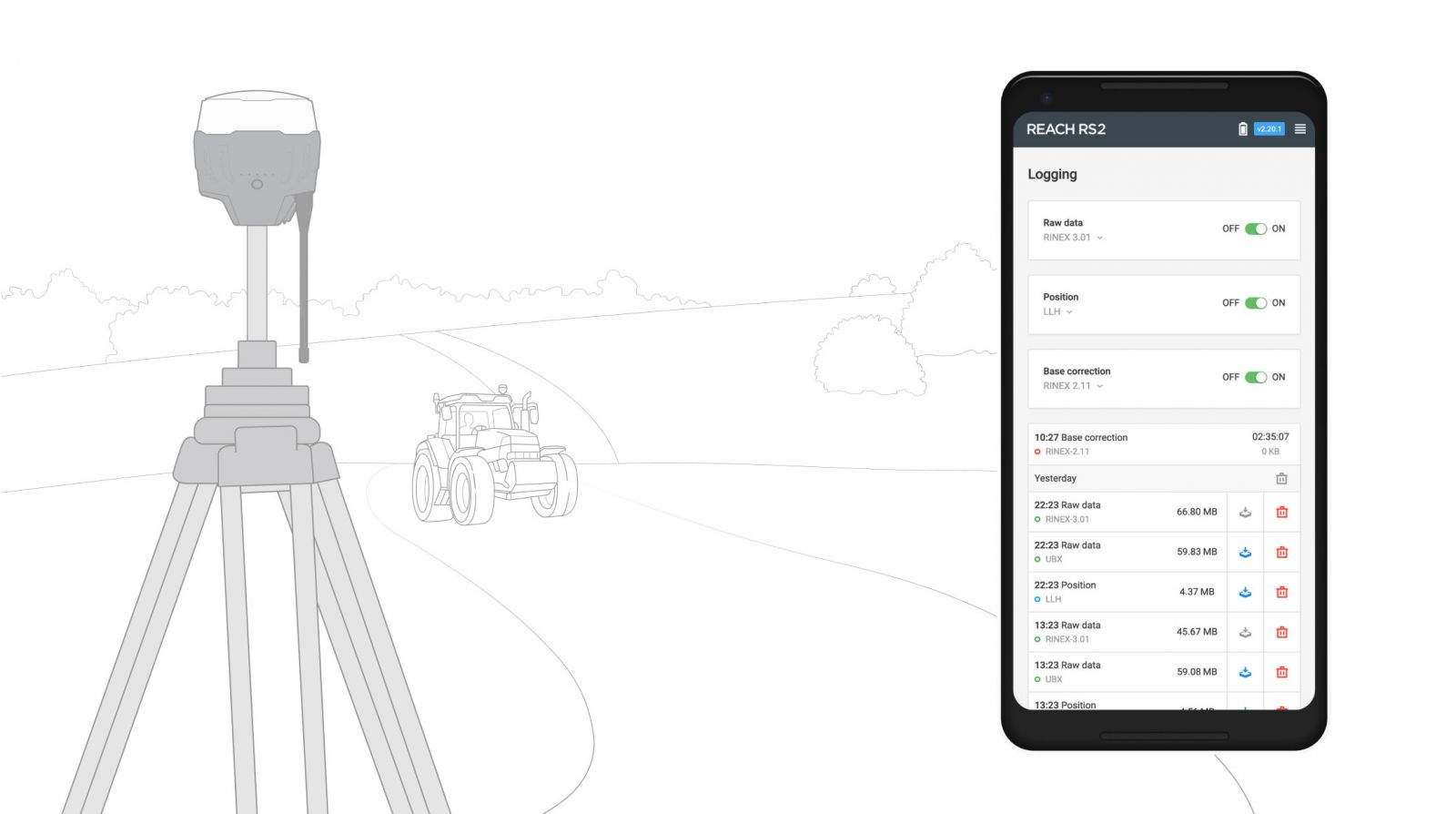
Logging in RINEX: record raw data,
position, and base correction logs
Record raw data, position and base correction logs with an update rate up to 10 Hz. Point collection and recording of RAW data are independent processes and can be used simultaneously. ReachView has a simple and intuitive interface for logging configuration and control.
We provide our version of RTKLib for PPK. It’s free and can be downloaded from our docs.
16 GB
storage
160+ days
of logging at 1 Hz
PPP for Opus
RINEX raw data logs are compatible with PPP services so you can now get centimeter-precise results in any place on Earth. Process RINEX files in an online service and get position with absolute accuracy.
Connectivity
Real-time position
streaming in NMEA
Reach provides data in standard NMEA that is used by most GIS apps. Simply connect your device to Reach over Bluetooth or with a cable, and turn on “Position output” in ReachView.

Reach can turn on and off automatically
Reach is able turn on and off in sync with an external battery connected over RS-232. This helps when the power button is hard to reach. For example, if the receiver is placed on the roof of a tractor.
Compatible apps
MachineryGuide, AgriBus-Navi, Efarmer, Agripilot, and others
Position streaming
Interfaces
RS-232, TCP, Bluetooth

NTRIP or another Reach
as a base station
Reach RS2 needs a base station as a source of corrections. That’s a requirement for centimeter accuracy in RTK and PPK. Base might be either another Reach RS2 receiver or an NTRIP service. VRS is also supported.
Reach RS2 works seamlessly with other Reach receivers over any link.
Input and output corrections
Interfaces
TCP, LoRa, Bluetooth, RS-232, NTRIP
FormatsRTCM3
Max distance from a base
- Over 60 km in RTK
- 100 km in PPK
- Any place on Earth with PPP

Engineered to be tough
Reach RS2 is designed to work even in the most challenging environments
IP67
RS2 is waterproof up to 1 m depth. All connectors are completely sealed and protected from water and dust with silicone plugs.
-20ºС...+65ºС
We extensively tested Reach RS2 in conditions that simulate coldest winters and hottest summers.
Polycarbonate body
Polycarbonate, an extremely durable material that is used in bulletproof glass, makes Reach RS2 impact-resistant.
Specifications
Reach RS2 Datasheet627 kb (we send it for translation separately)
Mechanical
- Dimensions 126x126x142 mm
- Weight 950 g
- Operating tº -20…+65 ºC
- Ingress protection IP67 (water and dust)
Electrical
-
Autonomy
16 hrs as 3.5G RTK rover,22 hrs logging -
Battery
LiFePO4 6400 mAh, 6.4 V -
External power input
6–40 V -
Charging
USB Type-C 5 V, 2 A -
Certification
FCC, CE
Connectivity
LoRa radio
- Frequency range 868/915 MHz
- Power 0.1 W
- Distance Up to 8 km
3.5G modem
- Regions Global
- Bands Quad-band, 850/1900,900/1800 MHz
- SIM card Nano-SIM
- Wi-Fi 802.11b/g/n
- Bluetooth 4.0/2.1 EDR
- Ports RS-232, USB Type-C
Ports RS-232, USB Type-C
- Static H: 4 mm + 0.5 ppmV: 8 mm + 1 ppm
- PPK H: 5 mm + 0.5 ppmV: 10 mm + 1 ppm
- RTK H: 7 mm + 1 ppmV: 14 mm + 1 ppm
- Convergence time ~5 s typically
Data
- Corrections NTRIP, RTCM3
- Position output NMEA, LLH/XYZ
- Data logging RINEX with events with update rate up to 20 Hz
- Internal storage 16 GB160+ days of logging at 1 Hz
GNSS
-
Signal tracked
GPS/QZSS L1C/A, L2CGLONASS L1OF, L2OFBeiDou B1I, B2I Galileo E1-B/C, E5b - Number of channels 184
-
Update rates
10 Hz GNSS - IMU 9DOF